Robotics Engineer · Automotive Perception · Physical AI
Production-grade LiDAR calibration and perception for autonomous driving. Building Physical AI pipelines on NVIDIA's simulation and robot-learning stack.
- Team Lead & Senior Engineer — 4D solid-state LiDAR calibration, Ibeo / MicroVision Hamburg (2020–2024)
- Professor of Mobile Robotics — IU International University of Applied Sciences (since 2023)
- Building Physical AI pipelines: turning recorded human motion into humanoid robot skills (Unitree G1 in NVIDIA IsaacLab)
- PhD in kinematics of parallel robots · Studienstiftung scholar · MSCA RISE fellow
Featured Projects
-
4D LiDAR Self-Calibration System
Production automotive perception — online, end-of-line and after-sales calibration for solid-state LiDAR.
-
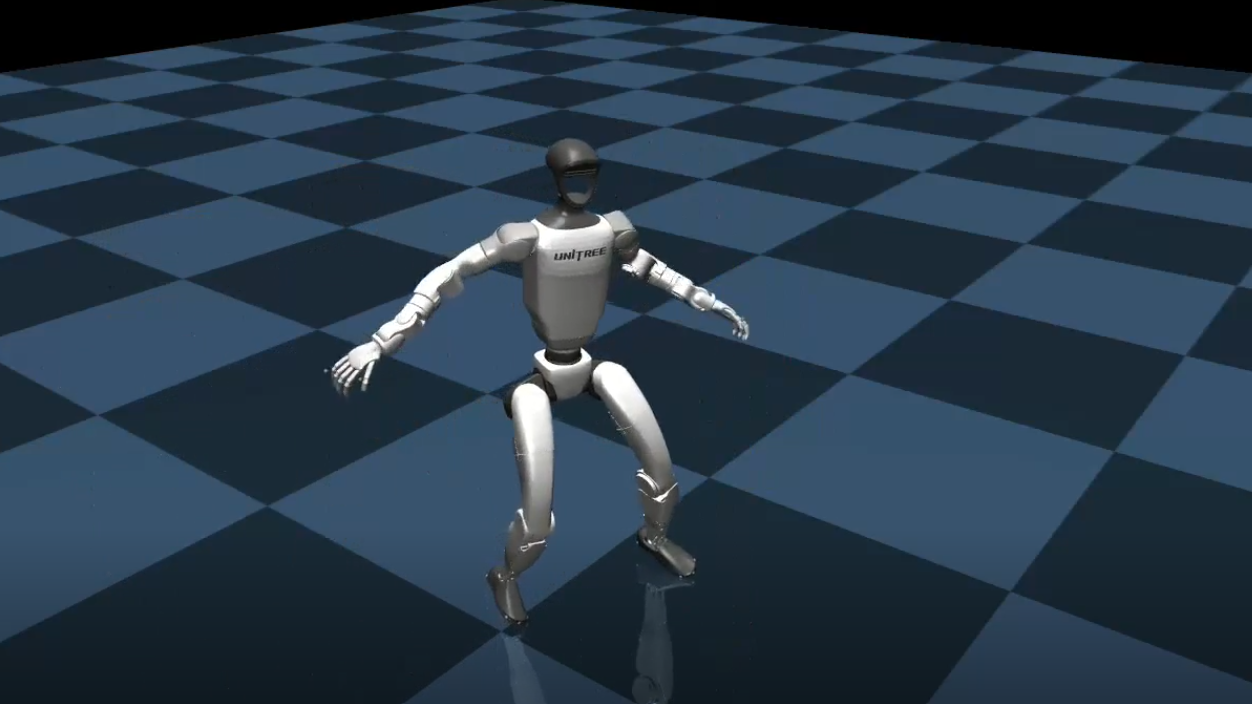
Human Motion Retargeting Pipeline for Humanoid Robots
End-to-end pipeline from IMU motion capture to RL training on the Unitree G1 via NVIDIA Isaac Lab.
-
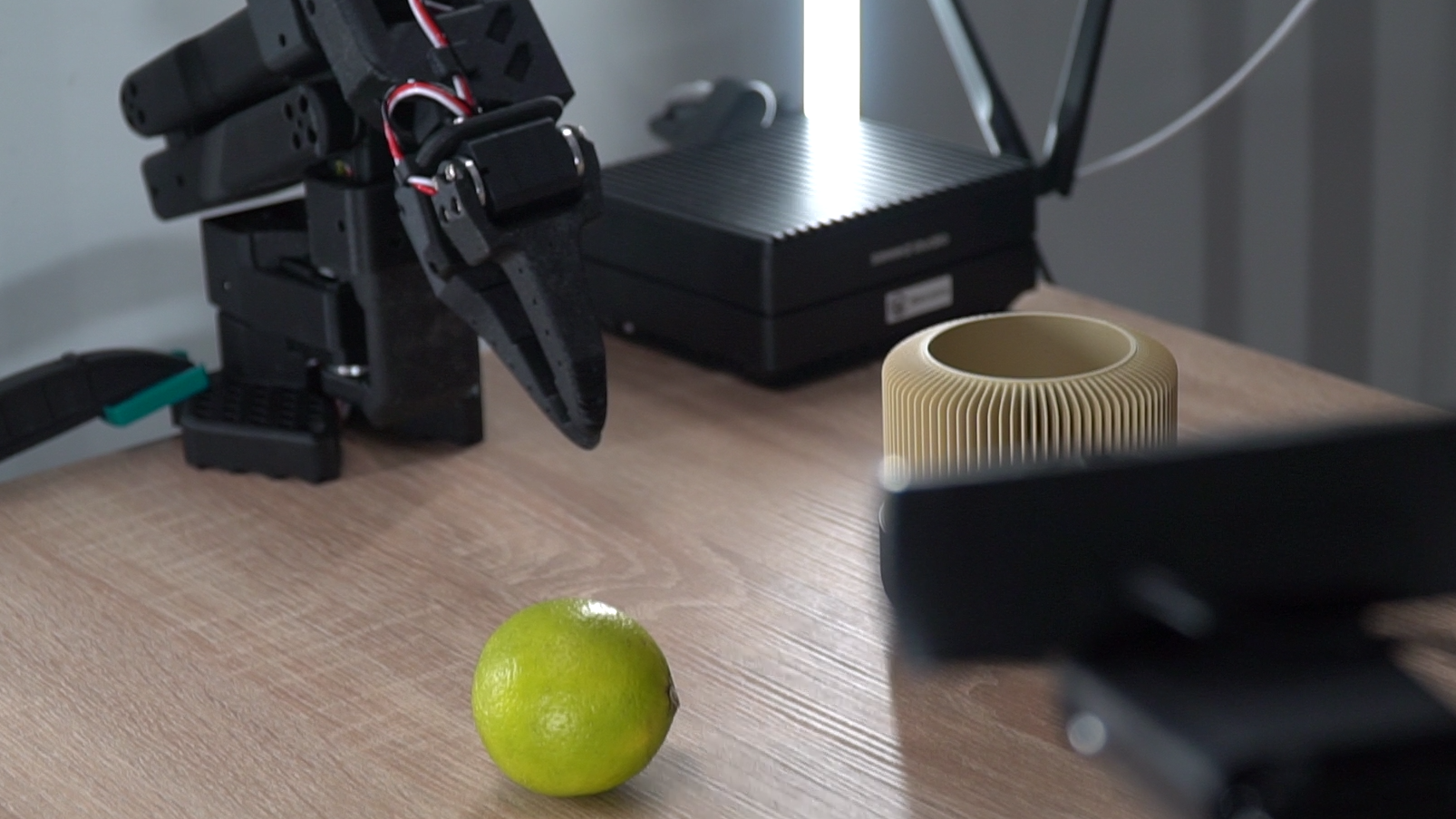
SO-101 IK + Hardware Ecosystem
Closed-form inverse kinematics and design of 3D-printed hardware accessories for the LeRobot SO-101 arm, published on MakerWorld.
-
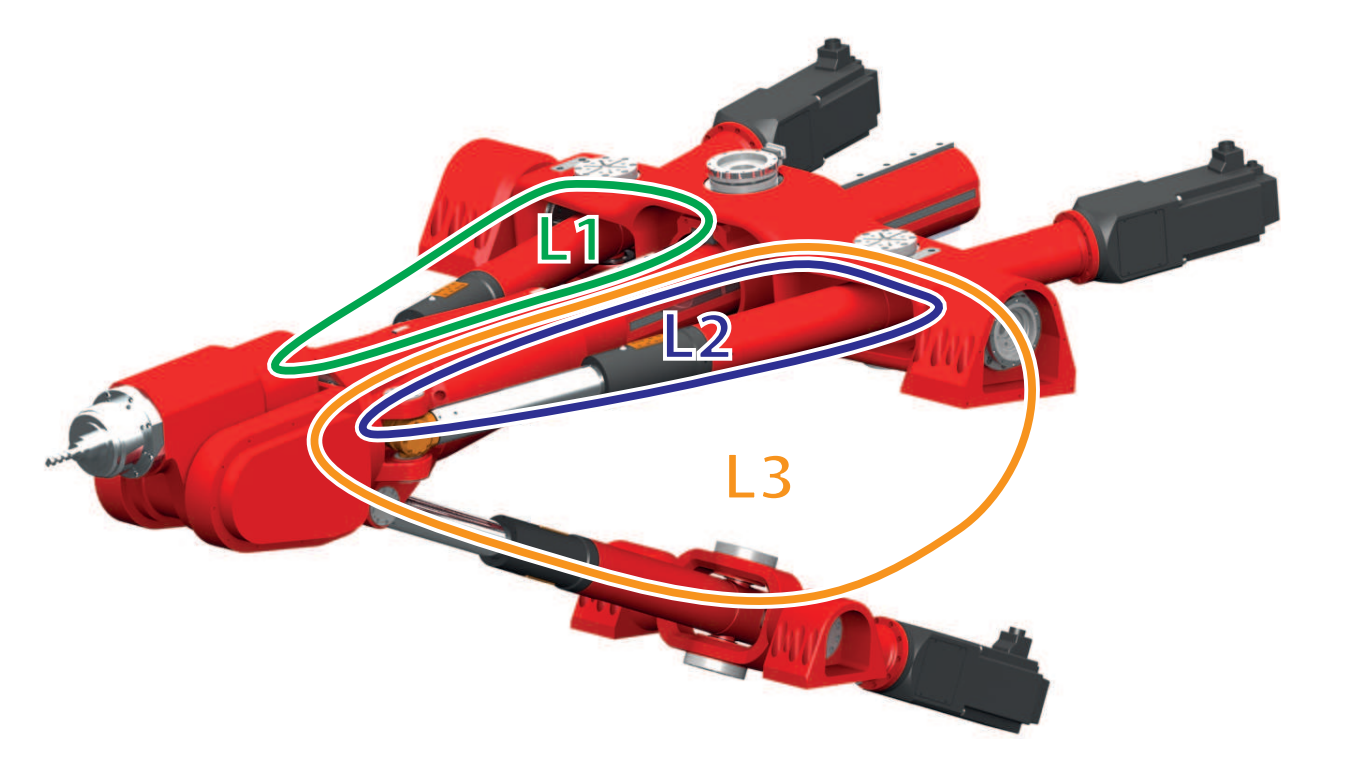
Parallel Robot Kinematics & Rigidity Analysis
A loop-based topological method for analyzing mobility and detecting rigid substructures in complex spatial multibody systems.

Selected Publications
-
Bruno, A., Simroth, F. (2026). Analysis of scan-pattern induced bias in deep learning methods for cross-calibration of LiDAR and camera. ICMERR 2026.
Submitted to ICMERR 2026
-
Simroth, F. (2020). A Loop-Based Approach for Topological Processing of Mobility and Subsystem Rigidity in Complex Spatial Multibody Systems. Doctoral Dissertation, University of Duisburg-Essen — DuEPublico.
-
Simroth, F., Ding, H., Kecskeméthy, A. (2016). Solving the double-banana rigidity problem: A loop-based approach. Mechanical Sciences, 7(1), 107–117.
About
Robotics engineer with a PhD in mechanism kinematics and production experience in automotive-grade LiDAR perception (Ibeo / MicroVision, 2020–2024). Currently teaching Mobile Robotics at IU and building Physical AI pipelines on NVIDIA's simulation stack — from human motion capture to humanoid robot control in NVIDIA IsaacLab.
Teaching
Professor of Mobile Robotics at IU International University of Applied Sciences, supervising student work pushing into NVIDIA Omniverse, Isaac Lab, and simulation-based robot learning. Currently supervising 12 theses as primary advisor and 10 as secondary advisor.
