Projects
Production automotive perception, Physical AI pipelines on the NVIDIA stack, open-source robot hardware, and foundational research on spatial mechanism kinematics.
-

4D LiDAR Self-Calibration System
Production automotive perception — online, end-of-line and after-sales calibration for solid-state LiDAR.
C++ · Python · ROS2 · AUTOSAR · SAFe/Scrum
-
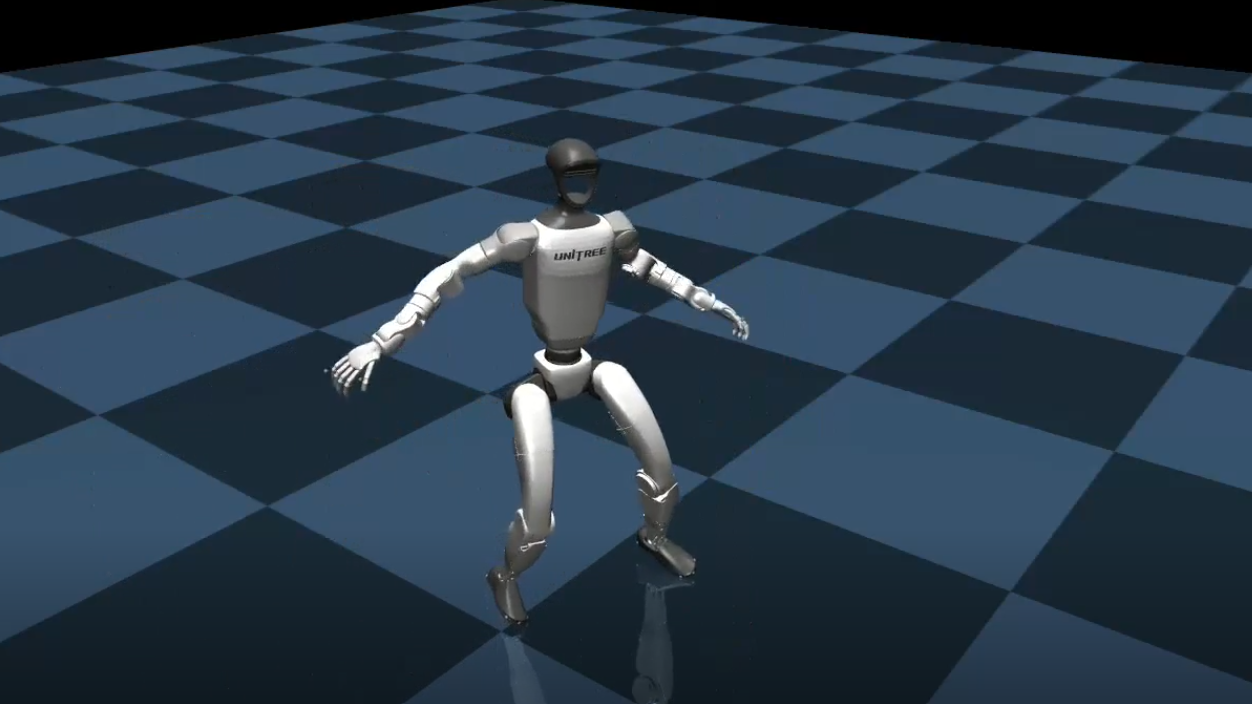
Human Motion Retargeting Pipeline for Humanoid Robots
End-to-end pipeline from IMU motion capture to RL training on the Unitree G1 via NVIDIA Isaac Lab.
NVIDIA Isaac Sim · OmniRetarget · IsaacLab · Python · MuJoCo
-
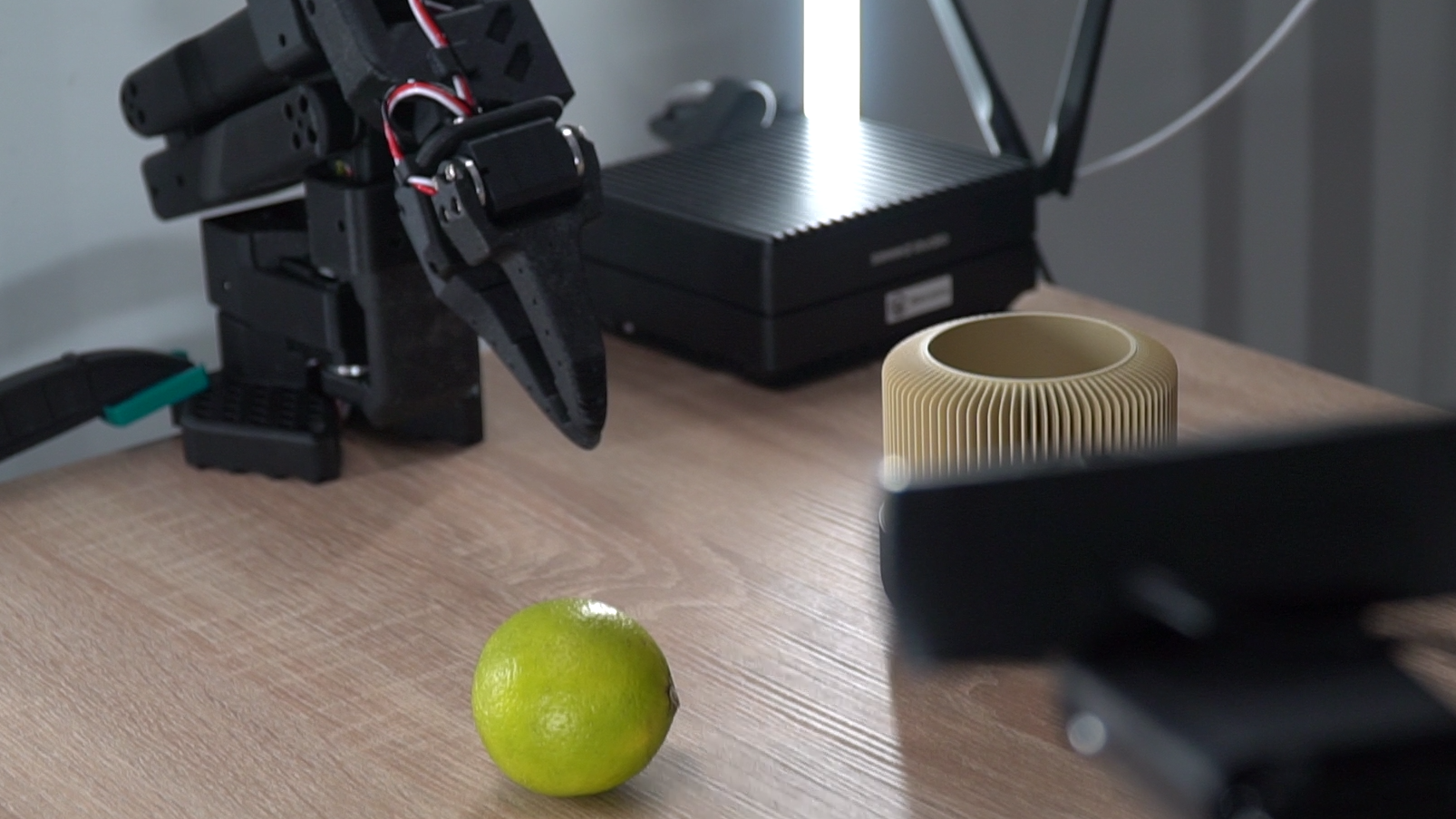
SO-101 IK + Hardware Ecosystem
Closed-form inverse kinematics and design of 3D-printed hardware accessories for the LeRobot SO-101 arm, published on MakerWorld.
Kinematic analysis · Python · 3D printing
-
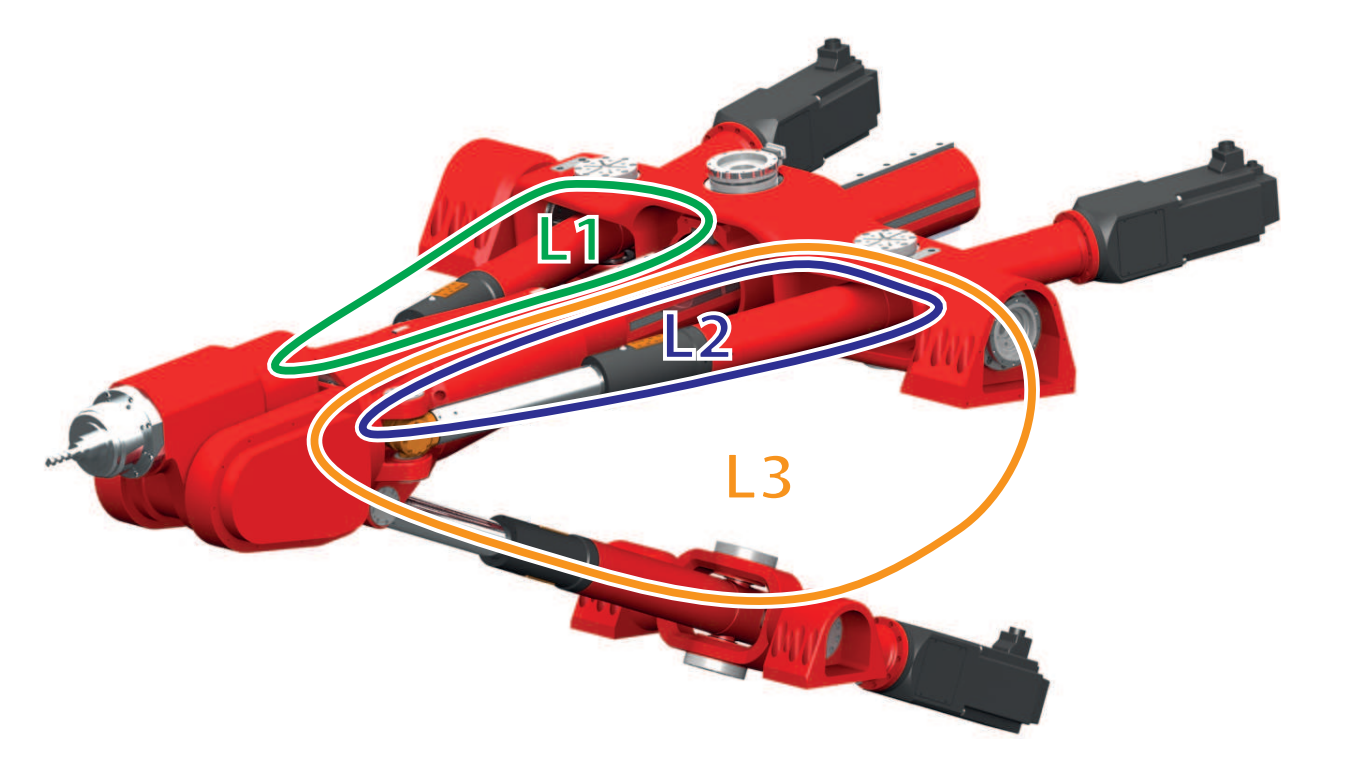
Parallel Robot Kinematics & Rigidity Analysis
A loop-based topological method for analyzing mobility and detecting rigid substructures in complex spatial multibody systems.
Mathematica · MSC Adams · Functional Programming