Parallel Robot Kinematics & Rigidity Analysis
A loop-based topological method for analyzing mobility and detecting rigid substructures in complex spatial multibody systems.
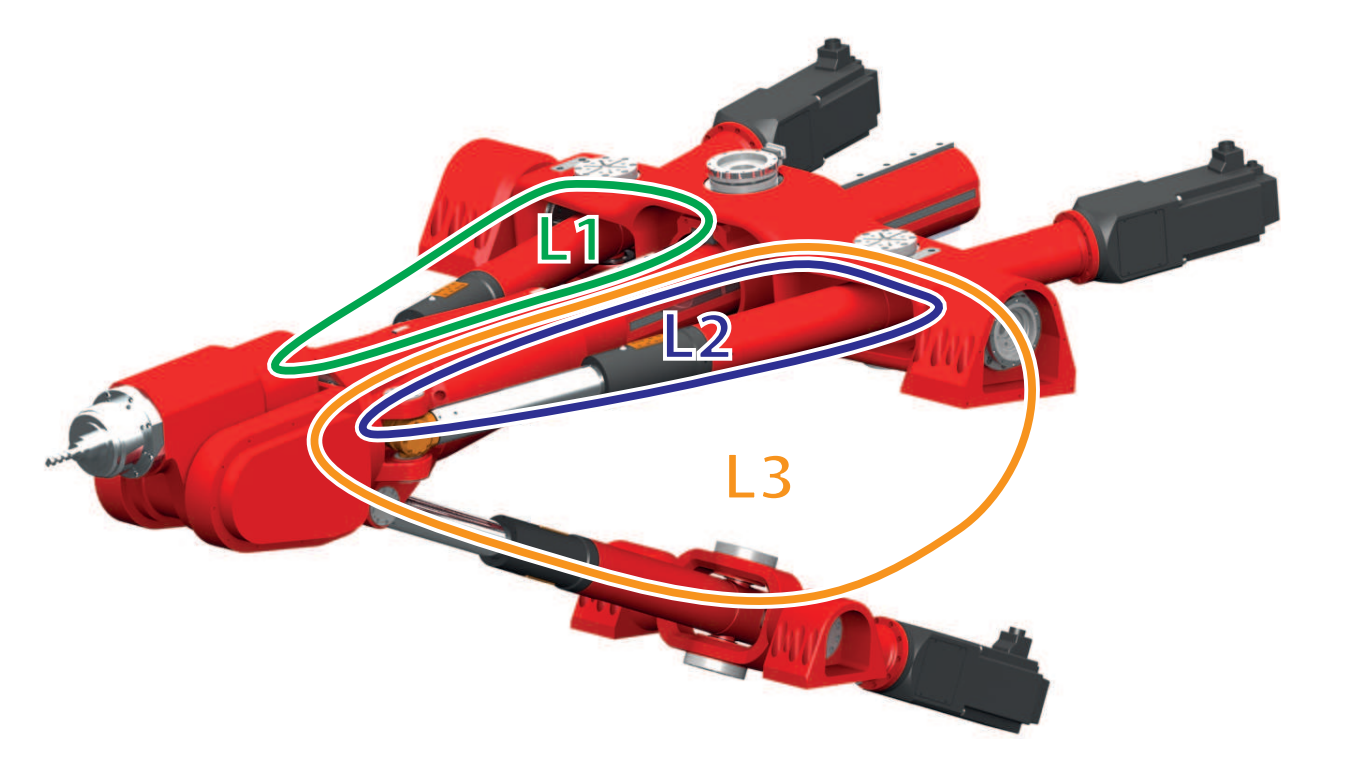
The problem: Determining the mobility (degrees of freedom) of complex spatial mechanisms is foundational to robot design. Classical Grübler–Chebychev formulas work for simple cases but give wrong results for overconstrained mechanisms — a well-known open problem in mechanism science.
What I developed: A loop-based topological method for analyzing mobility and detecting rigid substructures in complex spatial multibody systems. The approach resolves cases where global formulas fail, including pathological examples like the “double-banana” mechanism.
Publications:
- Simroth, F., Ding, H., & Kecskeméthy, A. (2016). Solving the double-banana rigidity problem: A loop-based approach. Mechanical Sciences, 7(1), 107–117.
- Simroth, F., Ding, H., & Kecskeméthy, A. (2015). A loop-based approach for the detection of rigid substructures in spatial nucleation-free spherical-spherical bar mechanisms. In Proceedings of the 14th IFToMM World Congress (pp. 382–391). Taipei, Taiwan.
Dissertation: Simroth, F. (2020). A Loop-Based Approach for Topological Processing of Mobility and Subsystem Rigidity in Complex Spatial Multibody Systems [Doctoral Dissertation, University of Duisburg-Essen]. DuEPublico. https://doi.org/10.17185/duepublico/73524