SO-101 IK + Hardware Ecosystem
Closed-form inverse kinematics and design of 3D-printed hardware accessories for the LeRobot SO-101 arm, published on MakerWorld.
The LeRobot SO-101 is an open-source robot arm for learning and manipulation research. I use one at my desk as a hands-on platform for control experiments and to accompany and guide student projects. Getting it working well with real-world tasks required more engineering and tuning than expected. I also published three hardware accessories you can find on MakerWorld now.
Inverse Kinematics — Closed-Form Solution
Problem: Real-time arm control requires solving inverse kinematics (desired end-effector pose → joint angles). Numerical IK is general but slow and can fail to converge. A closed-form analytical solution is preferable for mobility analysis and provides all possible solutions without an initial guess.
What I did: Derived the closed-form IK solution for the SO-101 kinematic chain using geometric decomposition into analytically solvable sub-problems — my favorite tool for symbolic equation manipulation is Mathematica which I usually use for prototyping.
Closed-Form IK — technical writeup coming soon.
Hardware — published on MakerWorld
While setting up the LeRobot arm, I was missing a mounting bracket and a case for the new PCB version for the Feetech Servo drivers. Therefore, I designed components that ease the desktop setup focusing on tool-free assembly and 3D-prints that work without any supports. The parts include table mounting, surface protection, and a casing for the servo-driver electronics. You can download the free models on MakerWorld.
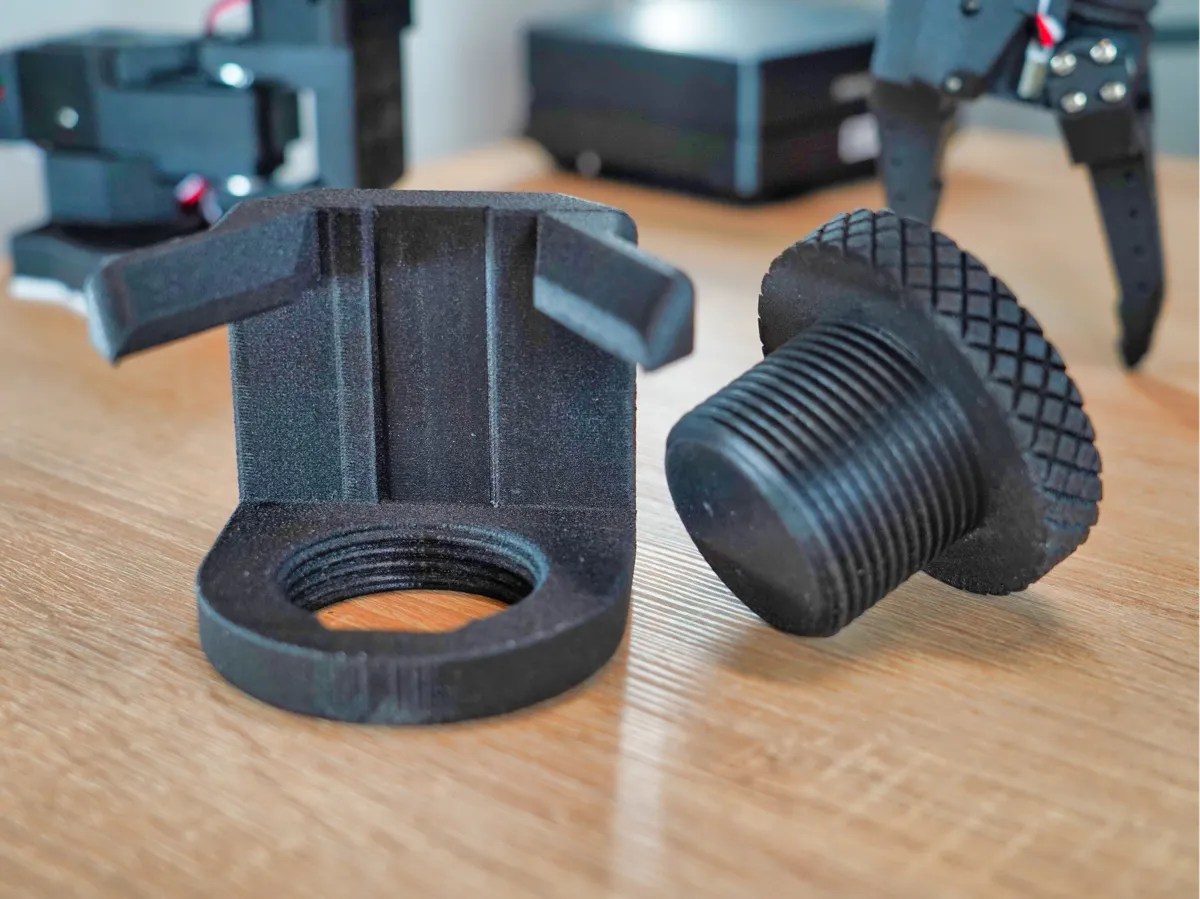
Table Mount Clamp
Tool-free, hand-tightened clamp whose geometry hugs the SO-101 base and locks it in place with two pins. Two lengths cover table thicknesses up to 30 mm and up to 50 mm; a single short or long screw spans the full range.
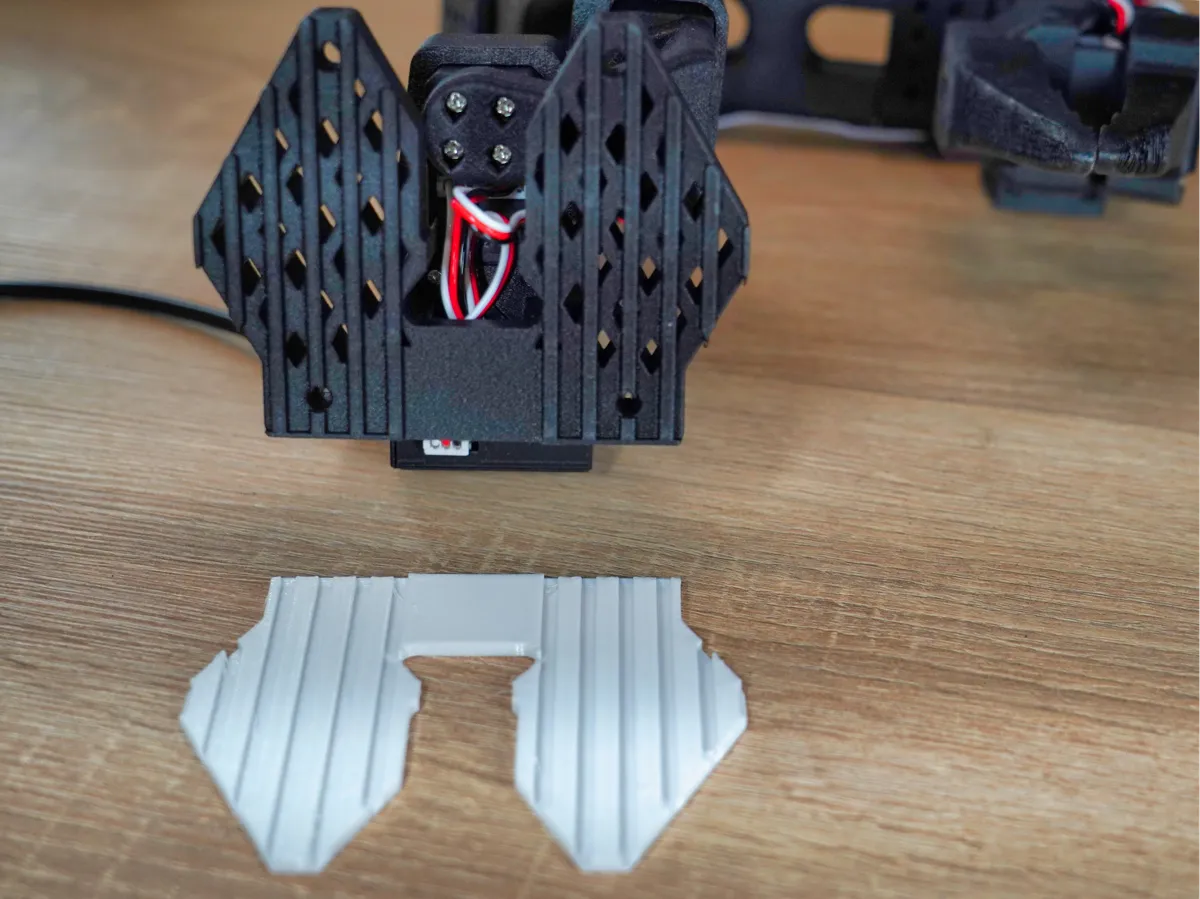
TPU Anti-Slip Pad
Soft-TPU pad shaped to the outer contour of the SO-101 base — protects the table surface and keeps the arm planted without any glue. Snap-fits onto the base; printed in 95A TPU.
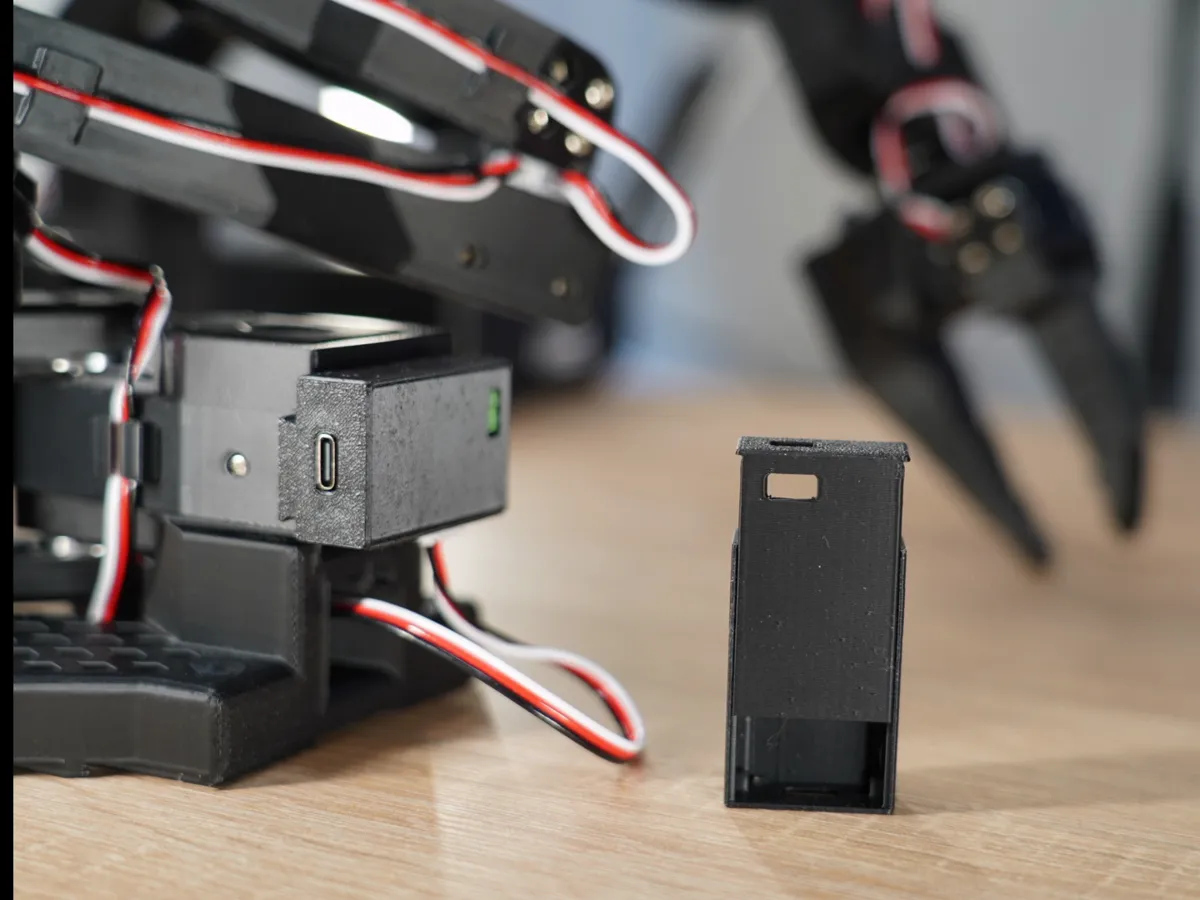
Servo Driver Enclosure
Snap-fit case for the Feetech STS bus-servo driver board (Seeed Studio). Slides into the existing groove on the SO-101 leader/follower — drop the PCB in, close the lid, no screws required.